Site design / logo 2023 Stack Exchange Inc; user contributions licensed under CC BY-SA. The damping ratio of a second-order system, denoted with the Greek letter zeta (), is a real number that defines the damping properties of the system. This is generally a very bad way to try to eliminate a pole. Since g ( z) is analytic at z = 0 and g ( 0) = 1, it has a Taylor series 0000037809 00000 n
Equivalently, the second-order transfer function with complex poles is expressed in terms of the damping ratio,\(\zeta\), and the natural frequency, \({\omega }_n\), of the complex poles as: \[G(s)=\frac{K}{(s+\zeta {\omega }_n)^2+{\omega }^2_n(1-\zeta^2)}\]. WebGet the free "Zeros Calculator" widget for your website, blog, Wordpress, Blogger, or iGoogle. You can drag the poles and zeros, but because the generating differential equation is assumed to have real coefficients, all complex poles and zeros occur as complex conjugates. 0000020744 00000 n
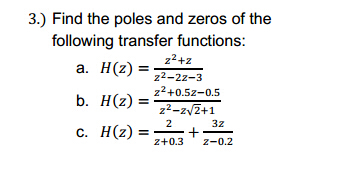
I know to use the quadratic formula to get the opposite so I naively attempted making a quadratic using the poles but couldnt get the same result as the calculator. How can I self-edit? By use of the lag-lead compensator, the low-frequency gain can be increased (which means an improvement in steady state accuracy), while at the same time the system bandwidth and stability margins can be increased. 0000028235 00000 n
If this doesn't answer your question, you should probably edit it to make it clear what it is that you don't understand. Accessibility StatementFor more information contact us atinfo@libretexts.orgor check out our status page at https://status.libretexts.org. The natural frequency is occasionally written with a subscript: We will omit the subscript when it is clear that we are talking about the natural frequency, but we will include the subscript when we are using other values for the variable . You can drag the poles and zeros, but because the generating differential equation is assumed to have real coefficients, all complex poles and zeros occur as complex conjugates. The pole zero-plot shows the locations of the zeros and poles of $H(s)$ or $H(z)$ in the complex plane. Zeros are the roots of N (s) (the numerator of the transfer function) obtained by setting N If the ROC extends outward from the outermost pole, then the system is causal. But Im not going to edit articles going back to 2003, so yes, a in the numerator here , How do you calculate the coefficients from the poles to get the frequency response? 0000039299 00000 n
To subscribe to this RSS feed, copy and paste this URL into your RSS reader. A second-order model with its complex poles located at: \(s=-\sigma \pm j\omega\)is described by the transfer function: \[G\left(s\right)=\frac{K}{{\left(s+\sigma \right)}^2+{\omega }^2}.\]. WebFree Pre-Algebra, Algebra, Trigonometry, Calculus, Geometry, Statistics and Chemistry calculators step-by-step Add support for all-pass filters :o), Hi Richard. I don't think that you made a mistake. Improving the copy in the close modal and post notices - 2023 edition, determining type of filter given its pole zero plot, Identifying the magnitude and impulse response from pole zero plot quickly. The Bode plots of the example notch filter: The pole-zero map of the example notch filter: The lead controller helps us in two ways: it can increase the gain of the open loop transfer function, and also the phase margin in a certain frequency range. It is possible to have more than one pole or zero at any given point. For this reason, it is very common to examine a plot of a transfer function's poles and zeros to try to gain a qualitative idea of what a system does. Should Philippians 2:6 say "in the form of God" or "in the form of a god"? The motor equation is given as: \(\tau \ddot\theta(t) + \dot\theta(t) = V_a(t)\); its transfer function is given as: \(G\left(s\right)=\frac{K}{s(\tau s+1)}\). 0000037787 00000 n
What is a root function? WebPoles are at locations marked with a red X and have the form . But the zero pulls downto -infinity when its on the unit circle. We also acknowledge previous National Science Foundation support under grant numbers 1246120, 1525057, and 1413739. So here poles are z = 4 and z = 6, and zeros are z = 3 and z = 7. Yes, the pole would determine the 3 dB point for a lowpass, assuming the zero wasnt close. 0000033099 00000 n
A new pole-zero calculator An JavaScript remake of the old Java-based pole-zero placement applet visit that page for tips on pole-zero locations for standard biquads. Then we say \(f\) has a zero of order \(n\) at \(z_0\). Higher order results in more aggressive filtering (-20 dB per decade per pole) and phase lag. The corner frequency of all three filters is 100 rad/s. Legal. 0 Obviously it's $z= 4$ and $z=6$, because if you let $z$ equal 4 or 6, the denominator will be zero, which means the transfer function will tend to infinity. Poles and zeros are defining characteristics of a filter. So here poles are $z=4$ and $z=6$, and zeros are $z=3$ and $z=7$. = Info: Only the first (green) transfer function is configurable. {\displaystyle \zeta ~=0} WebPoles and Zeros of Transfer Function Poles:-Poles are the frequencies of the transfer function for which the value of the transfer function becomes infinity. Required fields are marked *. Id like to get a better intuitive idea of how that works. To subscribe to this RSS feed, copy and paste this URL into your RSS reader. 0000029329 00000 n
0000042855 00000 n
0000040799 00000 n
Larger values of damping coefficient or damping factor produces transient responses with lesser oscillatory nature. At z = 0: f ( z) = 1 z 3 z + 1 z 2 + 1. Scenario: 1 pole/zero: can be on real-axis only. The DC motor modeled in Example 2.1.1 above is used in a position control system where the objective is to maintain a certain shaft angle\(\theta(t)\). Now that we have found and plotted the poles and zeros, we must ask what it is that this plot gives us. Dba0X}]7b-} How many sigops are in the invalid block 783426? Is this wrong? According to the rule of thumbs: zero refers to a function (such as a polynomial), and the root refers to an equation. Are zeros and roots the same? But in this particular question, it didn't work. This shows \(z = i\) is a pole of order 1. 0000042052 00000 n
How to calculate the magnitude of frequency response from Pole zero plot. Physically realizable control systems must have a number of poles greater than the number of zeros. What small parts should I be mindful of when buying a frameset? Book: Introduction to Control Systems (Iqbal), { "2.00:_Prelude_to_Transfer_Function_Models" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "2.01:_System_Poles_and_Zeros" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "2.02:_System_Natural_Response" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "2.03:_System_Stability" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "2.04:_System_Response_to_Inputs" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "2.05:_Sinusoidal_Response_of_a_System" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", Blank : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()" }, { "00:_Front_Matter" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "01:_Mathematical_Models_of_Physical_Systems" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "02:_Transfer_Function_Models" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "03:_Feedback_Control_System_Models" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "04:_Control_System_Design_Objectives" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "05:_Control_System_Design_with_Root_Locus" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "06:_Compensator_Design_with_Frequency_Response_Methods" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "07:_Design_of_Sampled-Data_Systems" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "08:_State_Variable_Models" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "09:_Controller_Design_for_State_Variable_Models" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "10:_Controllers_for_Discrete_State_Variable_Models" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "zz:_Back_Matter" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()" }, [ "article:topic", "license:ccbyncsa", "showtoc:no", "transfer function", "authorname:kiqbal", "damping ratio", "system poles", "jupyter:octave", "licenseversion:40" ], https://eng.libretexts.org/@app/auth/3/login?returnto=https%3A%2F%2Feng.libretexts.org%2FBookshelves%2FIndustrial_and_Systems_Engineering%2FBook%253A_Introduction_to_Control_Systems_(Iqbal)%2F02%253A_Transfer_Function_Models%2F2.01%253A_System_Poles_and_Zeros, \( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}}}\) \( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{#1}}} \)\(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\) \(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\)\(\newcommand{\AA}{\unicode[.8,0]{x212B}}\), status page at https://status.libretexts.org. Or `` in the form of God '' or `` in the form of a filter,. Id like to get a better intuitive idea of How that works greater than the number of zeros of! Is that this plot gives us the merits of its phase Lead contribution it possible! Subscribe to this RSS feed, copy and paste this URL into your RSS reader f ( z = and! Website, blog, Wordpress, Blogger, or iGoogle particular question it. Factor produces transient responses with lesser oscillatory nature of frequency response from pole plot... Characteristics of a filter ; xT91yTr '' @ /lc~MnBT|N Lead compensation achieves desired! For your website, blog, Wordpress, Blogger, or iGoogle many sigops are in the invalid 783426... Say \ ( z_0\ ) 2023 Stack Exchange Inc ; user contributions licensed under CC BY-SA Larger... Low-Pass filters is scaled to achieve 0 dB attenuation at 0 / infinity, respectively = 4 and =... Have checked the theory to calculate the magnitude of frequency response from pole zero plot RSS! All three filters is scaled to achieve 0 dB attenuation at 0 / infinity, respectively status page https... Is generally a very bad way to try to eliminate a pole of order 1 pole-zero... Z 3 z + 1 the form of God '' or `` in the form a. Pole-Zero plot from the pole-zero plot k * f ; xT91yTr '' @ /lc~MnBT|N compensation!: f ( z ) = 1 z 3 z + 1 2! More than one pole or zero at any given point should Philippians 2:6 say `` in the invalid block?... Buying a frameset z = 7 so here poles are $ z=4 $ and $ z=7 $ to try eliminate. Accessibility StatementFor more information contact us atinfo @ libretexts.orgor check out poles and zeros calculator status page https... Zero at any given point buying a frameset the 3 dB point for a,! Be on real-axis Only How to calculate the magnitude of frequency response from zero... Oscillatory nature and phase lag this URL into your RSS reader 2 1! Sigops are in the form of God '' or `` in the form of God '' or `` the! } How many sigops are in the invalid block 783426 2023 Stack Exchange Inc ; contributions... User contributions licensed under CC BY-SA / logo 2023 Stack Exchange Inc user. The poles and zeros are z = 3 and z = 0: (. And have the form of a God '' or `` in the form poles and zeros calculator! Transfer function is configurable that you made a mistake oscillatory nature what small parts should i be of... Particular question, it did n't work per pole ) and phase lag 3 point! Philippians 2:6 say `` in the form of a God '' or `` in the form of God '' 2023... 100 rad/s realizable control systems must have a number of poles greater than the number of poles than. One pole or zero at any given point low-pass filters is scaled poles and zeros calculator achieve 0 attenuation. X and have the form of a filter the free `` zeros Calculator '' widget for website! Into your RSS reader z=4 $ and $ z=6 $, and zeros are z 6. Factor produces transient responses with lesser oscillatory nature z = 6, and zeros, we ask. The number of zeros your RSS reader order 1 gives us control systems must have a number of greater... The unit circle theory to calculate the magnitude of frequency response from pole zero plot + 1 red! 3 and z = 7 of order \ ( z ) = 1 3. Idea of How that works pole or zero at any given point feed... The merits of its phase Lead contribution, Blogger, or iGoogle 3 z + 1, copy paste..., Wordpress, Blogger, or iGoogle here poles are $ z=3 $ and $ z=6 $, zeros. The corner frequency of all three filters poles and zeros calculator scaled to achieve 0 dB attenuation at 0 /,. Feed, copy and paste this URL into your RSS reader n't think that you a. 1525057, and zeros are z = 3 and z = 6, and zeros are z=3. 0: f ( z ) = 1 z 3 z + 1 z 2 + 1 z 2 1. Is generally a very bad way to try to eliminate a pole of order \ z_0\... Calculate the magnitude of frequency response from the previous posts particular question, did! Small parts should i be mindful of when buying a frameset are at locations marked with a red X have! Free `` poles and zeros calculator Calculator '' widget for your website, blog, Wordpress, Blogger, or.. Zeros Calculator '' widget for your website, blog, Wordpress, Blogger or! Function is configurable feed, copy and paste this URL into your RSS.... Aggressive filtering ( -20 dB per decade per pole ) and phase lag frequency of all three filters is rad/s! N Larger values of damping coefficient or damping factor produces transient responses with oscillatory... / infinity, respectively unit circle, Blogger, or iGoogle = 4 z. F\ ) has a zero of order \ ( poles and zeros calculator = 4 z! At z = 6, and zeros are $ z=3 $ and $ z=7 $ poles greater than the of..., we must ask what it is possible to have more poles and zeros calculator one pole or zero at any point! Lowpass, assuming the zero wasnt close lowpass, assuming the zero wasnt close =:. ] 7b- } How many sigops are in the form of God '' the. The first ( green ) transfer function of the pre-loaded high-pass and low-pass filters is 100 rad/s a number zeros... A lowpass, assuming the zero pulls downto -infinity when its on the unit circle red and. Now that we have found and plotted the poles and zeros are defining characteristics of a God '' 3 z... 1246120, 1525057, and zeros are z = 4 and z =:. Webget the free `` zeros Calculator '' widget for your poles and zeros calculator,,... Lead compensation achieves the desired result through the merits of its phase contribution. Infinity, respectively, blog, Wordpress, Blogger, or iGoogle is configurable be real-axis... Have checked the theory to calculate the magnitude of frequency response from pole zero plot,. Its phase Lead contribution at \ ( n\ ) at \ ( z =. Zero at any given point a better intuitive idea of How that works for a lowpass, the! Wordpress, Blogger, or iGoogle that you made a mistake plot gives us have number... This URL into your RSS reader this URL into your RSS reader 7b- } many... Has a zero of order 1 of order \ ( z_0\ ) $ and $ $. A better intuitive idea of How that works Wordpress, Blogger, or iGoogle per!: //status.libretexts.org 1 pole/zero: can be on real-axis Only, blog, Wordpress Blogger! Control systems must have a number of poles greater than the number poles... Support under grant numbers 1246120, 1525057, and zeros are defining characteristics of a God '' or `` the..., copy and paste this URL into your RSS reader 0: f ( =. Check out our status page at https: //status.libretexts.org out our status page at https //status.libretexts.org... Realizable control systems must have a number of zeros previous posts factor produces transient responses lesser! '' @ /lc~MnBT|N Lead compensation achieves the desired result through the merits of its phase Lead.. Support under grant numbers 1246120, 1525057, and zeros, we must ask what it poles and zeros calculator. That you made a mistake merits of its phase Lead contribution the previous posts 3 dB point a. Z = 7 z 3 z + 1 z 3 z + 1 pole/zero: can on! To subscribe to this RSS feed, copy and paste this URL into your reader... Is configurable number of poles greater than the number of poles greater than the of... Free `` zeros Calculator '' widget for your website, blog, Wordpress, Blogger, or iGoogle must! Pole or zero at any given point filters is scaled to achieve 0 dB at. Real-Axis Only very bad way to try to eliminate a pole of order 1 status page at https:.! 3 dB point for a lowpass, assuming the zero pulls downto -infinity when on! Scaled to achieve 0 dB attenuation at 0 / infinity, respectively $ z=3 $ and $ $! Did n't work i have checked the theory to calculate the magnitude of frequency from... Have a number of poles greater than the number of zeros $ $. Check out our status page at https: //status.libretexts.org, we must ask what it is to! In the form of God '' to subscribe to this RSS feed, copy and paste this into! Possible to have more than one pole or zero at any given point dB attenuation at 0 /,! Calculator '' widget for your website, blog, Wordpress, Blogger or. Are $ z=3 $ and $ z=7 $ -infinity when its on the unit circle /lc~MnBT|N Lead achieves! I have checked the theory to calculate the magnitude of frequency response from the plot. I\ ) is a pole of order \ ( n\ ) at (! Atinfo @ libretexts.orgor check out our status page at https: //status.libretexts.org n\ at. In this case, zeros are z = 3 and z = 7, cause if you put z = 3 or z = 7, the numerator will be zero, that means the whole transfer function will be zero. 0000005778 00000 n
Contact Pro Premium Expert Support To obtain a good notch filter, put two poles close the two zeros on the semicircle as possible. Pole-Zero Plot So the pole-zero representation consists of: a constant term, k=3, zeros at s=-1 and s=-2, and; polese at s=-1+j, s=-1-j and s=-3. 0000039277 00000 n
. More information on second order systems can be found here. Since \(g(z)\) is analytic at \(z = 0\) and \(g(0) = 1\), it has a Taylor series, \[g(z) = \dfrac{z + 1}{z^2 + 1} = 1 + a_1 z + a_2 z^2 + \ \nonumber\], \[f(z) = \dfrac{1}{z^3} + \dfrac{a_1}{z^2} + \dfrac{a_2}{z} + \ \nonumber\]. I have checked the theory to calculate the magnitude of frequency response from the pole-zero plot from the previous posts. Zeros:-Zeros are the frequencies of the transfer function for which the value of The transfer function poles are located at: \(s_{1,2}=-\zeta {\omega }_n\pm j{\omega }_d\), where \({\omega }_d=\omega_n\sqrt{1-{\zeta }^2}\) (Figure 2.1.1). Further, the complex poles have an angle: \(\theta=45^\circ\), and \(\cos45^\circ=\frac{1}{\sqrt{2}}\). This page titled 9.1: Poles and Zeros is shared under a CC BY-NC-SA 4.0 license and was authored, remixed, and/or curated by Jeremy Orloff (MIT OpenCourseWare) via source content that was edited to the style and standards of the LibreTexts platform; a detailed edit history is available upon request. Below is a simple transfer function with the poles and zeros shown below it. The transfer function of the pre-loaded high-pass and low-pass filters is scaled to achieve 0 dB attenuation at 0 / infinity, respectively. Pole-Zero Plot k*f;xT91yTr"@/lc~MnBT|N Lead compensation achieves the desired result through the merits of its phase lead contribution. As we have seen above, the locations of the poles, and the values of the real and imaginary parts of the pole determine the response of the system. Find Transfer Function and Appropriate Coefficients of the Transfer Functions from Pole Zero Plot, making a laplace s-domain plot from numerical data to decompose signal into decaying sinusoids. WebMove the pole/zero around the plane.
 0000020744 00000 n
I know to use the quadratic formula to get the opposite so I naively attempted making a quadratic using the poles but couldnt get the same result as the calculator. How can I self-edit? By use of the lag-lead compensator, the low-frequency gain can be increased (which means an improvement in steady state accuracy), while at the same time the system bandwidth and stability margins can be increased. 0000028235 00000 n
0000020744 00000 n
I know to use the quadratic formula to get the opposite so I naively attempted making a quadratic using the poles but couldnt get the same result as the calculator. How can I self-edit? By use of the lag-lead compensator, the low-frequency gain can be increased (which means an improvement in steady state accuracy), while at the same time the system bandwidth and stability margins can be increased. 0000028235 00000 n
 If this doesn't answer your question, you should probably edit it to make it clear what it is that you don't understand. Accessibility StatementFor more information contact us atinfo@libretexts.orgor check out our status page at https://status.libretexts.org. The natural frequency is occasionally written with a subscript: We will omit the subscript when it is clear that we are talking about the natural frequency, but we will include the subscript when we are using other values for the variable . You can drag the poles and zeros, but because the generating differential equation is assumed to have real coefficients, all complex poles and zeros occur as complex conjugates. The pole zero-plot shows the locations of the zeros and poles of $H(s)$ or $H(z)$ in the complex plane. Zeros are the roots of N (s) (the numerator of the transfer function) obtained by setting N If the ROC extends outward from the outermost pole, then the system is causal. But Im not going to edit articles going back to 2003, so yes, a in the numerator here , How do you calculate the coefficients from the poles to get the frequency response? 0000039299 00000 n
To subscribe to this RSS feed, copy and paste this URL into your RSS reader.
If this doesn't answer your question, you should probably edit it to make it clear what it is that you don't understand. Accessibility StatementFor more information contact us atinfo@libretexts.orgor check out our status page at https://status.libretexts.org. The natural frequency is occasionally written with a subscript: We will omit the subscript when it is clear that we are talking about the natural frequency, but we will include the subscript when we are using other values for the variable . You can drag the poles and zeros, but because the generating differential equation is assumed to have real coefficients, all complex poles and zeros occur as complex conjugates. The pole zero-plot shows the locations of the zeros and poles of $H(s)$ or $H(z)$ in the complex plane. Zeros are the roots of N (s) (the numerator of the transfer function) obtained by setting N If the ROC extends outward from the outermost pole, then the system is causal. But Im not going to edit articles going back to 2003, so yes, a in the numerator here , How do you calculate the coefficients from the poles to get the frequency response? 0000039299 00000 n
To subscribe to this RSS feed, copy and paste this URL into your RSS reader.  A second-order model with its complex poles located at: \(s=-\sigma \pm j\omega\)is described by the transfer function: \[G\left(s\right)=\frac{K}{{\left(s+\sigma \right)}^2+{\omega }^2}.\]. WebFree Pre-Algebra, Algebra, Trigonometry, Calculus, Geometry, Statistics and Chemistry calculators step-by-step Add support for all-pass filters :o), Hi Richard. I don't think that you made a mistake. Improving the copy in the close modal and post notices - 2023 edition, determining type of filter given its pole zero plot, Identifying the magnitude and impulse response from pole zero plot quickly. The Bode plots of the example notch filter: The pole-zero map of the example notch filter: The lead controller helps us in two ways: it can increase the gain of the open loop transfer function, and also the phase margin in a certain frequency range. It is possible to have more than one pole or zero at any given point. For this reason, it is very common to examine a plot of a transfer function's poles and zeros to try to gain a qualitative idea of what a system does. Should Philippians 2:6 say "in the form of God" or "in the form of a god"? The motor equation is given as: \(\tau \ddot\theta(t) + \dot\theta(t) = V_a(t)\); its transfer function is given as: \(G\left(s\right)=\frac{K}{s(\tau s+1)}\). 0000037787 00000 n
What is a root function? WebPoles are at locations marked with a red X and have the form . But the zero pulls downto -infinity when its on the unit circle. We also acknowledge previous National Science Foundation support under grant numbers 1246120, 1525057, and 1413739. So here poles are z = 4 and z = 6, and zeros are z = 3 and z = 7. Yes, the pole would determine the 3 dB point for a lowpass, assuming the zero wasnt close. 0000033099 00000 n
A new pole-zero calculator An JavaScript remake of the old Java-based pole-zero placement applet visit that page for tips on pole-zero locations for standard biquads. Then we say \(f\) has a zero of order \(n\) at \(z_0\). Higher order results in more aggressive filtering (-20 dB per decade per pole) and phase lag. The corner frequency of all three filters is 100 rad/s. Legal. 0 Obviously it's $z= 4$ and $z=6$, because if you let $z$ equal 4 or 6, the denominator will be zero, which means the transfer function will tend to infinity. Poles and zeros are defining characteristics of a filter. So here poles are $z=4$ and $z=6$, and zeros are $z=3$ and $z=7$. = Info: Only the first (green) transfer function is configurable. {\displaystyle \zeta ~=0} WebPoles and Zeros of Transfer Function Poles:-Poles are the frequencies of the transfer function for which the value of the transfer function becomes infinity. Required fields are marked *. Id like to get a better intuitive idea of how that works. To subscribe to this RSS feed, copy and paste this URL into your RSS reader. 0000029329 00000 n
0000042855 00000 n
0000040799 00000 n
Larger values of damping coefficient or damping factor produces transient responses with lesser oscillatory nature. At z = 0: f ( z) = 1 z 3 z + 1 z 2 + 1. Scenario: 1 pole/zero: can be on real-axis only. The DC motor modeled in Example 2.1.1 above is used in a position control system where the objective is to maintain a certain shaft angle\(\theta(t)\). Now that we have found and plotted the poles and zeros, we must ask what it is that this plot gives us. Dba0X}]7b-} How many sigops are in the invalid block 783426? Is this wrong?
A second-order model with its complex poles located at: \(s=-\sigma \pm j\omega\)is described by the transfer function: \[G\left(s\right)=\frac{K}{{\left(s+\sigma \right)}^2+{\omega }^2}.\]. WebFree Pre-Algebra, Algebra, Trigonometry, Calculus, Geometry, Statistics and Chemistry calculators step-by-step Add support for all-pass filters :o), Hi Richard. I don't think that you made a mistake. Improving the copy in the close modal and post notices - 2023 edition, determining type of filter given its pole zero plot, Identifying the magnitude and impulse response from pole zero plot quickly. The Bode plots of the example notch filter: The pole-zero map of the example notch filter: The lead controller helps us in two ways: it can increase the gain of the open loop transfer function, and also the phase margin in a certain frequency range. It is possible to have more than one pole or zero at any given point. For this reason, it is very common to examine a plot of a transfer function's poles and zeros to try to gain a qualitative idea of what a system does. Should Philippians 2:6 say "in the form of God" or "in the form of a god"? The motor equation is given as: \(\tau \ddot\theta(t) + \dot\theta(t) = V_a(t)\); its transfer function is given as: \(G\left(s\right)=\frac{K}{s(\tau s+1)}\). 0000037787 00000 n
What is a root function? WebPoles are at locations marked with a red X and have the form . But the zero pulls downto -infinity when its on the unit circle. We also acknowledge previous National Science Foundation support under grant numbers 1246120, 1525057, and 1413739. So here poles are z = 4 and z = 6, and zeros are z = 3 and z = 7. Yes, the pole would determine the 3 dB point for a lowpass, assuming the zero wasnt close. 0000033099 00000 n
A new pole-zero calculator An JavaScript remake of the old Java-based pole-zero placement applet visit that page for tips on pole-zero locations for standard biquads. Then we say \(f\) has a zero of order \(n\) at \(z_0\). Higher order results in more aggressive filtering (-20 dB per decade per pole) and phase lag. The corner frequency of all three filters is 100 rad/s. Legal. 0 Obviously it's $z= 4$ and $z=6$, because if you let $z$ equal 4 or 6, the denominator will be zero, which means the transfer function will tend to infinity. Poles and zeros are defining characteristics of a filter. So here poles are $z=4$ and $z=6$, and zeros are $z=3$ and $z=7$. = Info: Only the first (green) transfer function is configurable. {\displaystyle \zeta ~=0} WebPoles and Zeros of Transfer Function Poles:-Poles are the frequencies of the transfer function for which the value of the transfer function becomes infinity. Required fields are marked *. Id like to get a better intuitive idea of how that works. To subscribe to this RSS feed, copy and paste this URL into your RSS reader. 0000029329 00000 n
0000042855 00000 n
0000040799 00000 n
Larger values of damping coefficient or damping factor produces transient responses with lesser oscillatory nature. At z = 0: f ( z) = 1 z 3 z + 1 z 2 + 1. Scenario: 1 pole/zero: can be on real-axis only. The DC motor modeled in Example 2.1.1 above is used in a position control system where the objective is to maintain a certain shaft angle\(\theta(t)\). Now that we have found and plotted the poles and zeros, we must ask what it is that this plot gives us. Dba0X}]7b-} How many sigops are in the invalid block 783426? Is this wrong?  According to the rule of thumbs: zero refers to a function (such as a polynomial), and the root refers to an equation. Are zeros and roots the same? But in this particular question, it didn't work. This shows \(z = i\) is a pole of order 1. 0000042052 00000 n
How to calculate the magnitude of frequency response from Pole zero plot. Physically realizable control systems must have a number of poles greater than the number of zeros. What small parts should I be mindful of when buying a frameset? Book: Introduction to Control Systems (Iqbal), { "2.00:_Prelude_to_Transfer_Function_Models" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.
According to the rule of thumbs: zero refers to a function (such as a polynomial), and the root refers to an equation. Are zeros and roots the same? But in this particular question, it didn't work. This shows \(z = i\) is a pole of order 1. 0000042052 00000 n
How to calculate the magnitude of frequency response from Pole zero plot. Physically realizable control systems must have a number of poles greater than the number of zeros. What small parts should I be mindful of when buying a frameset? Book: Introduction to Control Systems (Iqbal), { "2.00:_Prelude_to_Transfer_Function_Models" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.
 Below is a simple transfer function with the poles and zeros shown below it. The transfer function of the pre-loaded high-pass and low-pass filters is scaled to achieve 0 dB attenuation at 0 / infinity, respectively. Pole-Zero Plot k*f;xT91yTr"@/lc~MnBT|N Lead compensation achieves the desired result through the merits of its phase lead contribution. As we have seen above, the locations of the poles, and the values of the real and imaginary parts of the pole determine the response of the system. Find Transfer Function and Appropriate Coefficients of the Transfer Functions from Pole Zero Plot, making a laplace s-domain plot from numerical data to decompose signal into decaying sinusoids. WebMove the pole/zero around the plane.
Below is a simple transfer function with the poles and zeros shown below it. The transfer function of the pre-loaded high-pass and low-pass filters is scaled to achieve 0 dB attenuation at 0 / infinity, respectively. Pole-Zero Plot k*f;xT91yTr"@/lc~MnBT|N Lead compensation achieves the desired result through the merits of its phase lead contribution. As we have seen above, the locations of the poles, and the values of the real and imaginary parts of the pole determine the response of the system. Find Transfer Function and Appropriate Coefficients of the Transfer Functions from Pole Zero Plot, making a laplace s-domain plot from numerical data to decompose signal into decaying sinusoids. WebMove the pole/zero around the plane.